UC4H Mavlink-Bridge: First working Prototype
30. Dez. 2018
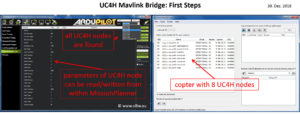
Another feature which was badly missing is the possibility of configuring the UAVCAN nodes seamlessly in a user-friendly way with „ArduPilot tools“, i.e., without the need to connect an extra SLCAN adapter and use special software, such as the UAVCAN GUI Tool. I’m not claiming to have solved that completely now, but this might be a significant step forward.
As regards configuration of parameters, a solution has in principle been defined several years ago as UAVCAN-MAVLink bridge, see here (and it appears to be implemented in PX4 since 2016). As usual with UAVCAN, ArduPilot is behind, and doesn’t have anything of this. Interestingly, MissionPlanner in contrast has already some support!
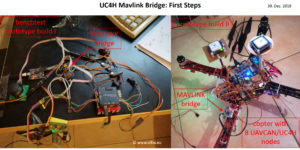
In principle, the MAVLink bridge should be part of the ArduPilot code, but this I couldn’t yet achieve. However, I could do it with a „piece of on-board equipment“, such as a general-purpose UC4H node. As usual with UAVCAN, the UAVCAN messages have not been well designed, which results in some not-so-nice issues code-wise and makes it trickier and more resource-hungry than needed. I guess I’m going to add my own UAVCAN messages. Anyway, a first well-working prototype I have now completed:
Finally, I have to say that I’m not convinced that the UAVACN-MAVLink bridge concept is the final answer. An alternative approach would be an integrated on-board SLCAN adapter, which would decouple the development of the UAVCAN configuration tools from the ArduPilot development, which would be much more efficient workload-wise and likely would give the user much better tools. I guess I’m going to try this approach too.