can you post your parameters, its possible that the pinouts do not match the INav ones
↧
Matek f405-CTR - only one motor spins, no GPS
↧
Avoidance Experiments with the POC and Benewake TFMINI
Yes for indoor only it would work.
↧
↧
ArduRover on real competition R/C 1/10 car on real circuit: missions. FAR FROM WORKING
Limitation:
SERVO2_MAX=1600
which is reached frequently as seen on RCOU.C2.
I’ll increase this. However, with CRUISE_SPEED=4.7 and not having inserted DO_CHANGE_SPEED waypoints, the car simply goes too fast (in another test, also at 4.7m/s, the car was stopped at a barrier), as well as at 1.6m/s the car went too fast at the small circuit.
Also:
SERVO2_MIN=1000
SERVO2_TRIM=1517
Minimum RCOU.C2 is seen as SERVO2_TRIM: the car does not brake. Above (december 18):
“… On the big circuit add DO_CHANGE_SPEED waypoints and improve lap time. How can I brake the car?…”
No answer.
These are the waypoints types:
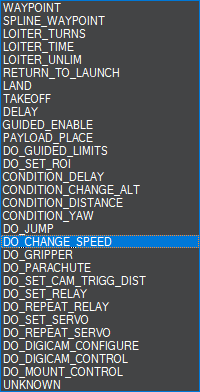
I wonder if a DO_CHANGE_SPEED with a negative speed would make the car brake, making R2.COU go under SERVO2_TRIM=1517.
“…What is your hardware setup with regard to accelerometers and connected wires? Do you indeed have two sets? Is one of them subject to more electromagnetic interference than the other?..”
The controller is a Pixhawk, with the adition of two external compasses. The probable sensors are as follows:
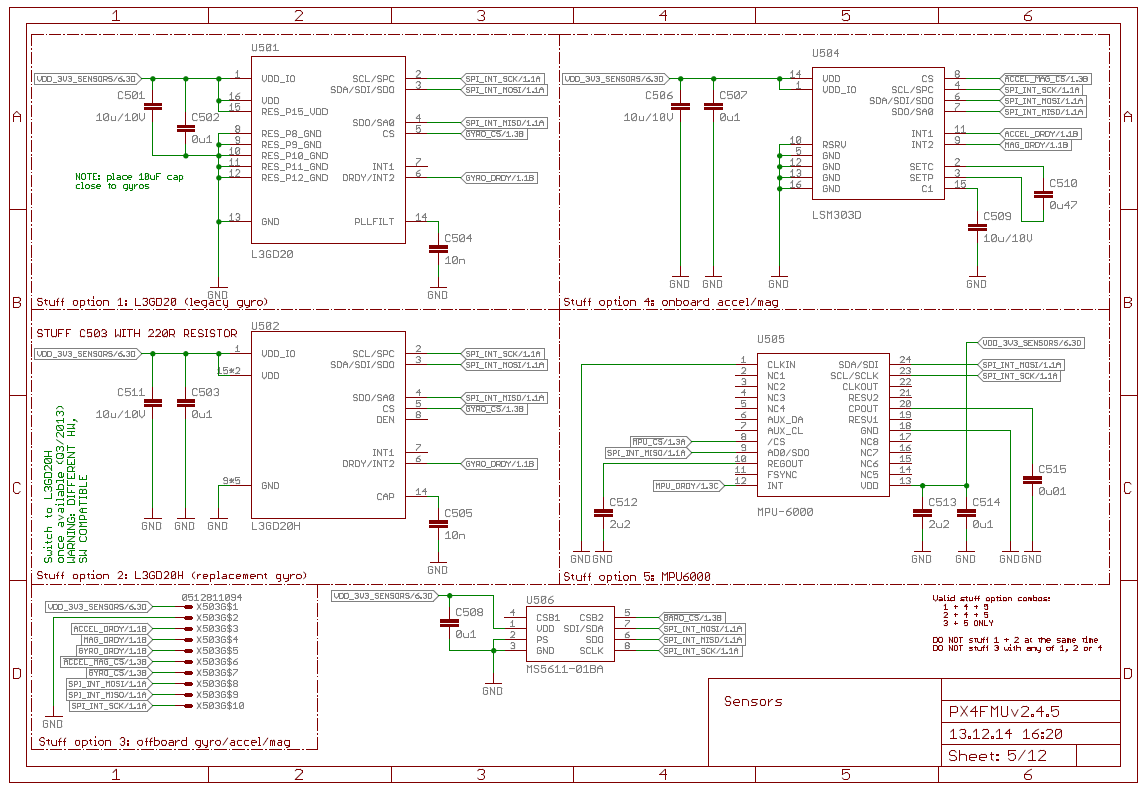
From the Pixhawk documentation:
Sensors:
-MPU6000 as main accel and gyro
-ST Micro 16-bit gyroscope
-ST Micro 14-bit accelerometer/compass (magnetometer)
-MEAS barometer
The MPU6000 and the MEAS barometer are clear in the schematic above (MPU-6000 (from Invensense) and MS5611 (from TE)), but not so much the ST components.
From ST documentation:
L3GD20H: 3-axis gyroscope, I2C/SPI digital output, low-power 3-axis angular rate sensor, 16 bit rate value data output, I2C/SPI digital output interface.
LSM303D: 3D accelerometer and 3D magnetometer, 16-bit data output, I2C serial interface
So the ST Micro 16-bit gyroscope in the Pixhawk documentation should be the L3GD20H in the schematic, and the ST Micro 14-bit accelerometer/compass (magnetometer) could be the LSM303D in the schematic, being “14.bit” an error.
What is labelled X503 (offboard gyro/accel/mag), being others labelled Uxxx, should be an SPI gyro/accel/mag (I don’t know which), but I have not added anything like this.
So IMU1 and IMU2 are those inside the Pixhawk, moreless in the same conditions (at different distances from the 3DR antenna or the motor). Being from different manufacturers (Invensense and TE) they may behave differently.
↧
RPM, Governor, NotchFilters and BLHeli32: Ideas and Overview
Hey guys,
instead of using a standard Heli govenor ESC, we can use a BLHeli32 ESC.
This will lead us to a true Motor-RPM reading over telemetry, which enables us to:
- Do the governor directly in the Ardupilot code including better tuning options.
- Natively implementing: Helicopter Rotor Speed Governor
- Something like: https://www.rcgroups.com/forums/showpost.php?p=41163713&postcount=5567
In reply to: Helicopter Rotor Speed Governor
BlHeli32 ESCs are available up to 65A (Holybro) and pretty common up to 45A (TMotor, Holybro etc.) In the light of X-Class etc. I would expect a lot more high Current ESCs in the future.
65A should be enough for everything up to 500 sized helis, which could be ideal for getting started with TradHeli?
This could cut the costs per ESC in half on every build.
For Copter: BlHeli is the standard and therefore switching to Heli would be effortless.
ESC Telemetry overview:
http://ardupilot.org/copter/docs/common-dshot.html
↧
Matek f405-CTR - only one motor spins, no GPS
Thanks for reply, all default parameters, params file will provide later
↧
↧
VISION_POSITION_ESTIMATE not appearing in QGroundControl
Hello,
I’m new here, so let me introduce quickly myself. I’m interested by the vision method for localization (e.g. SLAM). My project is to make navigation in indoor environnement for drones, and as I suppose you know, there is big challenge about it !
I’ve tested AprilTag (which are visual marker similar to Aruco) as only source for positioning system. And I had the same situation of big noise in thoses axis.
From what I understand, this method has a major problem : When the camera is coplanar to the tag (especially when the camera is in front of the tag), there is a situation of " singularity " generating this noise.
The library Aruco v3 has an “estimation” function which tries to reduce this phenomena - it is remembering the last pose for the next one in order to avoid the noise (if you need, I can provide you the reference). It is better, but the noise is still here (even with adding filters).
For me, I’m moving for another solution. Keeping in mind that AprilTag/Aruco are great and cheap method, but will not be used for unique source of positionning in the outter loop.
I hope that you have found a way to fix it.
↧
Matek f405-CTR - only one motor spins, no GPS
have you seen this?
http://ardupilot.org/copter/docs/common-matekf405.html#default-uart-order
↧
Radiolink r8ef to pixhawk connection
Wow! thanks for the pic. pricelesss! 72 sounds lovely.
Thanks again
↧
Tutorial for running SITL Simulator on MacOS with Vagrant + XQuartz
Thanks for taking the time.
the error message is:
No usable default provider could be found for your system.
Vagrant relies on interactions with 3rd party systems, known as
“providers”, to provide Vagrant with resources to run development
environments. Examples are VirtualBox, VMware, Hyper-V.
The easiest solution to this message is to install VirtualBox, which
is available for free on all major platforms.
If you believe you already have a provider available, make sure it
is properly installed and configured. You can see more details about
why a particular provider isn’t working by forcing usage with
vagrant up --provider=PROVIDER, which should give you a more specific
error message for that particular provider.
So which provider do I need to specify?
Have I neglected to install something?
↧
↧
Is it Possible: sbus one receiver connect to two pixhawks
Wow, thanks for trying this.
I think I will go with 2 receiver. Perhaps x8r and r9. But the ap-m only supports one pwm/ppm input. But receivers never fail, do they?
But currently I have another issue that I do not see any sbus coming in on my Pixhawk 4 mini, from the x8r. Pwm/ppm is good but no sbus signal at all. But that’s another story. Thanks again
@luisvale sorry already have my ap-m. But have you got some short circuit protection for my two batteries to offer?
↧
Matek f405-CTR - only one motor spins, no GPS
yes, no success
Primary I want to fix motors, looks like arducopter aand iNav use different mapping, but i compared https://github.com/ArduPilot/ardupilot/blob/master/libraries/AP_HAL_ChibiOS/hwdef/MatekF405/hwdef.dat and https://github.com/iNavFlight/inav/blob/master/src/main/target/MATEKF405/target.c - pwm ports mapping looks similar
↧
VISION_POSITION_ESTIMATE not appearing in QGroundControl
Hi
With a board of marker instead of a single marker there is way less noise.
http://ardupilot.org/dev/docs/ros-aruco-detection.html
Anyway aruco_gridboard use aruco lib from opencv3 that is aruco v2 and from what I read from the aruco site v3 if better and faster.
Also UcoSLAM is really interesting, a SLAM library that uses both keypoints and aruco marker.
↧
VISION_POSITION_ESTIMATE not appearing in QGroundControl
I have seen the amazing project of UcoSLAM, and seems to be a nice way to merge Aruco and SLAM (including monocular and stereo), improving at the same time ORB-SLAM2.
The only bad point, is that UcoSLAM Cmake is not design for ARM architecture.
Precisely, the library designed by the team of " rmsalinas " called Fbow is only for Intel processor (like x86)
I’ve been in contact with him, and if I have time, I will try to make it compatible with ARM. And, cherry on the cake, see if it can be optimize for GPU (like ORB-SLAM can do with CUDA).
↧
↧
Getting the Tarot T4-3D to work with the PWM servo output of the Pixhawk
here’s the instructions for the Tarot T-2D but it is similar to the T4
http://ardupilot.org/copter/docs/common-tarot-gimbal.html#common-tarot-gimbal
↧
Long range UAV link 100mw for 60KM was designed and tested
Anyone reading can buy one and join the conversation. I have only had mine a week and I have been reporting my findings. Posting our findings has been a group effort and I have found a wealth of information here. So please, join in if you have an interest or need for the Skydroid system.
Since I live in New York, it is Winter so I won’t be flying for months. Even when I can fly, I fly LOS because it is New York.
So far, everything I have tried has worked. Last night, I even swapped my gimbal knob (X3 and Y3) for two button channels using the Equipment Helper. Now it’s time to connect the gimbal.
↧
Soaring/Gliding for Planes
Thanks for the quick and understandable reply and attention to my questions ! I wanted to know in what sequence to include the modes SOAR_ENABLE_CH and AUTO. Is it possible to first use the mode of SOAR_ENABLE_CH then turn on AUTO or first AUTO then turn SOAR_ENABLE_CH? ? Can I enable this mode SOAR_ENABLE_CH at any time modes AUTO, FBWB or CRUISE?
↧
Matek f405-CTR - only one motor spins, no GPS
Hi!
I use this controller with firmware 3.6.5. Everything works fine.
Maybe PM will be able to communicate in their native language…
↧
↧
VISION_POSITION_ESTIMATE not appearing in QGroundControl
It would be great if you succeed with this porting and if you keep us informed.
Thanks
↧
RPM, Governor, NotchFilters and BLHeli32: Ideas and Overview
It’s not motor rpm that I’m really after, I really need to know what the rotor speed is in order to judge start up and shutdown. The other issue with using BL Heli’s ESC‘s is that it drives everybody to one ESC which I don’t think is realistic. The solution I was looking for was trying to use something that’s already resident on the controller. The other idea would be to use a cheap Hall effect sensor that you can get for less than $10.
I’m not sure what you mean by this. I’m running Castle Creation ESCs and I’m pretty happy with the options I have and how well it holds rotort speed. Now there are probably things that could be improved like how to set up for practice autorotations but I’m pretty sure that can all be done now with the current software.
@ChrisOlson recently implemented a rotor speed governor which I was primarily designed for internal combustion engines but can be used for electric motors. Most of the responses we have received on this implementation have been positive and it is driven from RPM 1 sensor. So right now RPM 1 is connected to a hall effect sensor in Chris’ case but could be modified to receive other hardware inputs. I would think it would be possible to link it to the telemetry motor RPM from BLHeli. this would certainly work in governing the motor and therefore the rotor but doesn’t give us the complete picture on the state of the rotor which is important.
Now this is an interested concept. I’m not sure tradheli could implement it the same way because the rotors don’t stop when the motor stops. So this would have to be based on rotor speed using some rotor speed sensor.
↧
Tilt-Rotor VTOL Transition Throttle Behavior
I have been using the Sensirion SDP33 module from Drotek:
I’ve had repeated issues with the 4525DSO and MS5525 (Noise + Drift and I2C errors, respectively) so I sided with the SDP33 despite its oddities (Slower response time due to an on-board averaging filter, and fixed (unchangeable) tube length).
That said, I plan to migrate to a dual UAVCAN airspeed sensor setup soon.
↧