Sounds like you have a lot of interference where the Pixhawk is mounted. Offsets should never really total above 600 on any compass I think. I think all my externals are usually around 200 or less. Like the other Dave says disable the internal until you can get the interference under control. My internals are all below 600 but I have made sure the controller is in somewhat of a decent spot
↧
My 1st Rover Project
↧
CUAV V5 with dual Power Modules
The CUAV V5 controller comes configured for a power module on Power1, and for a smart battery on Power2. I’m posting this for information for folks who wish to use two power modules for redundant power and monitoring of dual batteries.
Redundant power can be supplied to the Power2 port without any change if you do not wish to monitor dual batteries. Simply remove the pins for the batt current and voltage sensors from the Power2 plug.
For monitoring of dual batteries with Power Modules:
On the bottom of the main board there is two jumpers labeled J2 and J3. These jumpers can be soldered for either I2C or ADC. They come from the manufacturer soldered to the I2C side for a smart battery. You must cut the solder trace to the I2C pins and re-solder them to the ADC side to use a power module on Power2 with BAT2 monitoring. It is clearly labeled on the board and an included circuit diagram below.


↧
↧
My 1st Rover Project
I already disabled the internal compass completely. When I move the external gps/compass around it doesn’t turn.
Seems it’s only being used as the gps & not a compass. I also pressed “Force External Enabled” and still it wants to detect the pix for the direction it’s pointing and using the external solely for gps tracking.
I would like both compass/gps to all be done via the external module but still unsuccessful in doing so.
The Accelerometer calibration only detects the pix’a movement & when I try using the external compass module it doesn’t detect anything and says calibration failed.
↧
My 1st Rover Project
I guess I don’t understand your previous post. I thought you were saying the green bars seen during compass calibration were active for 2 compass’s. If that’s true then 2 are enabled. Go back to the Compass calibration screen and press the big green button at the top “Pixhawk/Px4”, then uncheck compass 2, make no other changes and re-do the compass calibration.
↧
Stream rate changes in flight
Thank you for your quick response. I was using Copter 3.6.5 for my tests. @danielh I figured out that when I request all data streams at 50 Hz using
rosrun mavros mavsys rate --all 50.
ardupilot tries to send all of them at 50 Hz. But since the main loop that controls all of the stream rates runs at 50 Hz, I observed that it can’t handle sending all of them at 50 Hz. So I’ve reduced some of the streams and individually changed two streams to 50 Hz and it seems that it works like this. But of course I have to do this every time I reboot the FCU.
#startup.sh
rosrun mavros mavsys rate --all 5 #Without this line /mavros/state is connected but no other topics are published by mavros
rosrun mavros mavsys rate --extra1 50 #for ATTITUDE message
rosrun mavros mavsys rate --position 50 #for LOCAL_POSITION_NED message
@peterbarker
I will definitely switch to master and take a look at the SET_MESSAGE_INTERVAL related code and try to get these messages on master since the aforementioned mavros commands are only workarounds. Thanks a lot!
↧
↧
RPM, Governor, NotchFilters and BLHeli32: Ideas and Overview
[quote=“Corrado_Steri, post:4, topic:38542”]
Software that runs electric governor is really a lot different than the one that drives piston/turbine. Best way to have electric governor working good is using the rpm feedback from esc where provided.[/quote]
This is where all electric heli ESC’s get the rpm information - from the EMF feedback from the inactive phase in the motor. It is used by the built-in governor and typically the setup software will have entries for gearing information to set headspeed.
It is more common on heavily loaded UAV helicopters than with 3D. Under 3D operation the speeds are very high, lots of power, low torque load on the autorotation clutch. On UAV’s the helicopter can approach 1.5 lbs/ft^2 disc loading at slower speed with extreme torque load on the clutch. Even using the wrong lubricant can cause a slipping clutch on a big UAV heli that weighs 40-50 lbs, and it is a regular maintenance item during scheduled inspections.
For big pistons it is quite challenging to get a smooth autorotation recovery if full-down autos are not being done. The rotating mass in the engine, drivetrain and rotor is quite significant. If rotor speed has been lost during autorotation or in the flare and a recovery is attempted without going full-down, the torque must be controlled or it will jerk the tail 180 degrees. It has to come back on fast, but it has to be smooth to maintain yaw control of the helicopter.
The governor knowing what the rotor speed is is the key to determining how it handles the throttle to bring it back to rated speed without torque jerking it. I made a last-minute change to the governor code to handle this properly so the pilot can simply slam the collective into the climb range and the governor will handle accelerating the mass without LTE. I’ve yet to see an electric ESC governor that handles this properly if rotor speed is lost and power re-engaged. They will jerk the heli in a torque turn. I decided ArduPilot’s governor can do better than that.
Notice on the last fast recovery where I let rotor speed bleed off. Then I simply slam the collective into the climb range, the heli lifts off, and the governor handles smoothly finishing the acceleration to rated speed and re-engages in the air. And the tail holds perfect thru the whole affair.
↧
My 1st Rover Project
Will try this evening once home from work. Will let you know the results. Many thanks Dave
↧
Altitude glitch on Holybro Pixhawk V4 (fmuV5) with CUAV 5 Copter 3.6.5
OK, It seems it’s an hardware issue.
I’ve changed the flight controller with a identical model and copied the configuration.
Every thing seems fine now.
↧
Advice needed: Best Gimbal & Action camera combo?
Hi guys,
I’m just starting out with gimbals. My goal is to get smooth decent photography/video and FPV capability.
After some research here is the best I could find:
Gimbal: Tarot GOPRO 3DⅢ
https://www.banggood.com/Tarot-GOPRO…r_warehouse=CN
Camera: Gitup G3 Duo (for AV out)
https://www.banggood.com/Gitup-G3-Du…r_warehouse=CN
AV out Cable for FPV
https://www.banggood.com/Gopro3-Vide…r_warehouse=CN
I’m planning on mounting this to an F450 DJI Flamewheel frame, and then also to a DAYA 680 (should I use rail mounts?). The reason why I picked the Gitup camera was becuase I found out that the latest GoPros only have HD out, and so that was the best AV out sports cam I found find.
Let me know if you share my same thoughts or have other hardware ideas. Thank you!
↧
↧
Mapping a lake with ArduPilot
Hi Olav! Great achievment for mapping and fishing with Qgc. I have the same carplounge rt4 with pixhawk and lowrance elite 4 with nmea out and bt gps. Curently i am using MP. Mapping with Reefmater and laptop not a problem, but fishing is unhandy. Android tablet and qgc looks much comfortable. I made my bathymetric mapbox maps but stuck in qgc modification to load proper map layers. Can you please share you experience.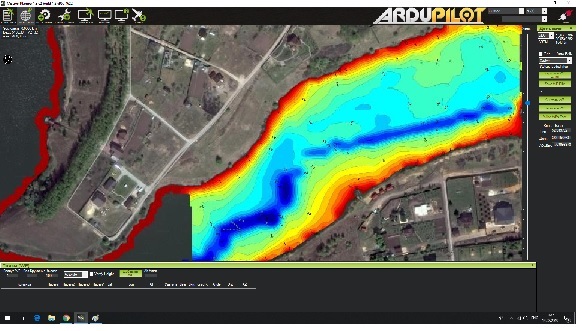
↧
RPM, Governor, NotchFilters and BLHeli32: Ideas and Overview
Believe me, i know more about the subject than i would like. Having designed and produced thousands of helis and countless firmware releases on our flybarless system i understand and know each problem bit by bit.
What i wrote comes from 20 years experience in the heli and flybarless business.

Corrado
↧
My 1st Rover Project
OK. By repeating the Wizard you can be wiping out progess. No reason to use it after initially, I never use it.
↧
Help Object Avoidance TF02
Hi @rmackay9
Thank you for your answer, today I setup the vehicle following the wiki guideline.
The rover moved when see an obstacle, but the problem was the square was not enough big and waving appears passing the waypoints. And sometimes the rover did not recognize the obstacle and hit me.
Is this configuration correct?
RNGFND_TRIGGR_CM: 100
RNGFND_TURN_ANGL: 45
RNGFND_TURN_TIME: 1s
RNGFND_DEBOUNCE: 1
RNGFND_MAX_CM: 1200
RNGFND_MIN_CM: 5
AVOID_DIST_MAX:2
AVOID_MARGIN: 1
AVOID_ENABLE: 7
Now I received an RTK here+ and maybe improves the waves, no?
Thank’s
Eduard
↧
↧
Arduplae without compass possible?
You are suggesting eliminate the gps on the drone, that`s dificult, but very interesting i will follow this discussion
↧
Getting the Tarot T4-3D to work with the PWM servo output of the Pixhawk
@Helmet Have you had success controlling the T4-3D with the PWM output of the Pixhawk? I am wondering if it only understands SBUS.
↧
SingleCopter & CoaxCopter Support
Hi all!
I’ve built a coaxcopter too  and it’s seems that i have the same issue as AeroGen.
and it’s seems that i have the same issue as AeroGen.
So, i used the 3.6.5 firmware on PixRacer, wired as in the wiki (Servo1:Front Flap,Servo2: right Flap. Servo5:Upper Mot Servo6:lower Mot).
Frame Class 9, Type 0 (“Plus”)
When i armed, motors spins, seems to well react to yaw rc inpout, but to pitch and roll RC input too and when i tilt the frame it’s seems that motors react to pitch and roll angle too. As their are mot 5 and 6 of a hexacopter…???
Servo don’t move to.i’ve tried several servo#_function, RCPassTrought servo move on RC Input but don’t stabilize (seems to be logic…), Aileron and Elevator functions no reaction(RC Input and/or frame orientations).
I can’t find Forward Flap and Right Flap Servo Function, what i missed?
↧
Advice needed: Best Gimbal & Action camera combo?

↧
↧
RPM, Governor, NotchFilters and BLHeli32: Ideas and Overview
That’s great! However, what @bnsgeyer was referring to in using rotor rpm is that we currently use two timers to determine when the heli is ready to fly. One of those timers is redundant and I think a hold-over from the old auto-takeoff method. Although it does also come into play for engaging certain modes using Altitude Hold too.
In the code there has always been a method used to estimate rotor speed based on Setpoint, which is really, really crude. And I recently added a method using an actual rpm sensor. So the rpm sensor is currently only for the governor. But we can use it to replace this old “estimated” rotor speed method. Bill is looking at a method to use when there is no rotor speed sensor available. And since rotor speed is independent of engine/motor speed and only somewhat loosely related, ESC rpm output tells us nothing that we need to know to accomplish the end goal. We need to know rotor speed. It is the RRPM, and what percentage of RRPM we are at, that determines whether or not the heli flies. In the absence of a rotor speed sensor Bill needs to make it work for all drive types, both electric and combustion engine, where no speed sensor is used.
If somebody wants to spend the time to get one particular type of ESC’s rpm telemetry output into the RPM Library it will work for the governor, but it won’t work as good as measuring rotor speed because the percentage ratio of RRPM vs ERPM yields different values, depending on transmission ratios in the main and tailrotor gearboxes. A helicopter may fly based on raw main thrust, but may be uncontrollable due to LTE. If the prime mover is not running, which is typical with electric drives during in-flight needle split, then that ESC rpm output tells us absolutely nothing about the flying state of the helicopter because it is zero.
↧
Arduplae without compass possible?
Yes, it’s possible to fly without the compass. Plane will use GPS track to determine direction in which plane is going. Although it may be tricky in strong winds when plane will drift significantly and then GPS track will not match plane heading because of the wind drift.
↧
Controlling position by setpoints with companion computer (ROS) (Precision Landing)
Hello everyone,
My goal is to land the drone very precisely and it successfully lands in the Gazebo simulation. My approach is:
- Detecting visual targets, their distances and orientations,
- Reading acceleration from
/mavros/imu/datafor my landing code’s Kalman Filter, (ATTITUDE) - Reading odometry message through
/mavros/local_position/odom, (LOCAL_POSITION_NED) - Sending relative position targets according to odometry, through
mavros/setpoint_position/local
My problem is, I need to send setpoints at 50Hz or 100Hz otherwise, in slower setup like 10Hz, ardupilot tries to run away from the point that I sent. I see this behaviour in simulation. On the real copter side, It’s even more unpredictable. I’ve tried to send at 200Hz and it aggressively controlled the drone under wind, then landed on the target once. But since it was a bit overkill, I didn’t try again.
Since the odometry is perfect in the simulation, I tried to send a single absolute waypoint like “go 1 meter in x”, before reaching to the point, it didn’t slowdown and passed a bit, then fixed its position. I don’t know ArduPilot parameters well, I observed that it holds its position good after auto tuning and I don’t want to hurt its parameters
I switched my drone to ArduPilot because PX4 was very bad at position control, mission waypoint style, landing / landing detector etc. -for my drone. Even before auto tuning, Ardupilot was flying very well on the first flight. The weird thing is, I can land PX4, landed more than hundreds of times by sending position commands. The difference of the setpoint styles is, PX4 expects setpoint commands continuously, in order to reach to the point, it stops when I stop sending. Ardupilot takes just one setpoint and doesn’t stop till it reaches to the point.
What approach would you guys suggest for this? I know Ardupilot has a builtin precision landing support but I’m trying to achieve more precision (Previously achieved with PX4). Basically, my code tries to make it hover above the target, then sends land command inside my thresholds.
↧